让蛋立起来,走起来 - 艾斯湃纳的技术解决方案
-
自动化
-
医疗.福利
-
居住环境
-
汽车
-
机器人
-
助力服
-
辅助移动
-
配送机器人
-
康复机器
-
外骨骼
-
运输装置

通过图像识别和位置检测等先进的技术组合,实现新的"运动"
探险家克里斯托弗·哥伦布通过让鸡蛋站起来展示了他的伟大事业。"让鸡蛋站起来看起来很困难的事,我们要以挑战的态度、新的灵感、具备足够的力量去实现。"经过了5个世纪,我们想要超越这段轶事,让立起来的鸡蛋走起来。
为此,作为在展览会和商务谈判上用于演示的概念产品,我们在电机控制技术上组合了图像识别和位置检测等最先进的技术,并将其放入蛋形外壳中,开发出了倒立的两轮机器人"Plegg"。
我们的新用武之地正在不断扩大。例如,我们也在开发用于以协作机器人为代表的AGV(自动引导车)和AMR(自主移动机器人)上使用的模块和系统,用来实现工厂内自由移动,以解决制造业人工不足的问题。"Plegg"采用通俗易懂的方式展示了艾斯湃纳的产品开发实力,获得了广泛的好评。
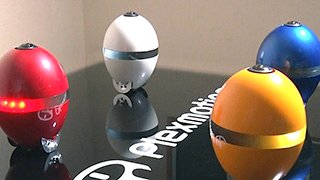 倒立两轮机器人“Plegg”
倒立两轮机器人“Plegg”
在行驶区域内,4台机器人不会发生碰撞,并能合作运行
基于多种技术,采用新的方法
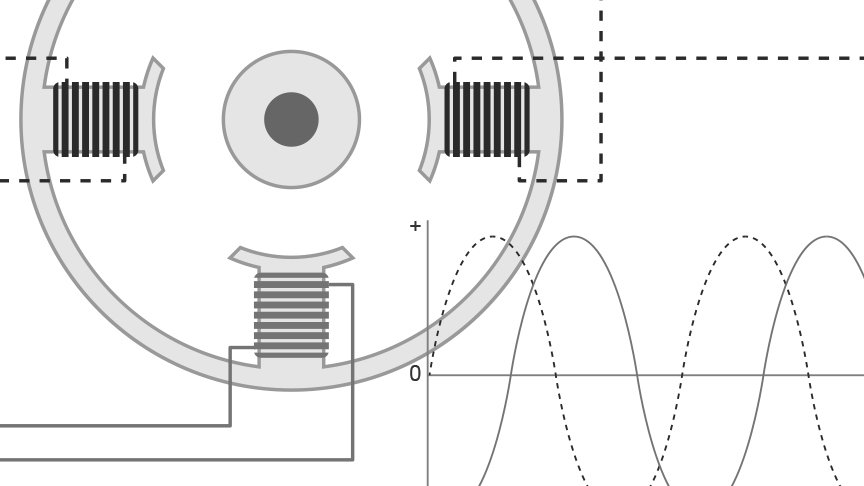
"Plegg"使用传感器检测自己的倾斜度,依靠适当控制转动车轮的两个电机保持平衡。艾斯湃纳通过在极短的周期内反复进行平衡控制,使用"倒立摆"的技术实现顺畅的行驶和稳定停止,开发出了"Plegg"。
所谓"倒立摆"是一种控制系统,可以让重心较高的物体在站立状态下移动。让蛋形物体立在两轮上时,一般的"倒立摆"控制可以实现前后摆动的同时保持静止的操作,但是使用艾斯湃纳运动控制技术的“倒立摆”,可以实现如同静止状态般的精确停车操作。
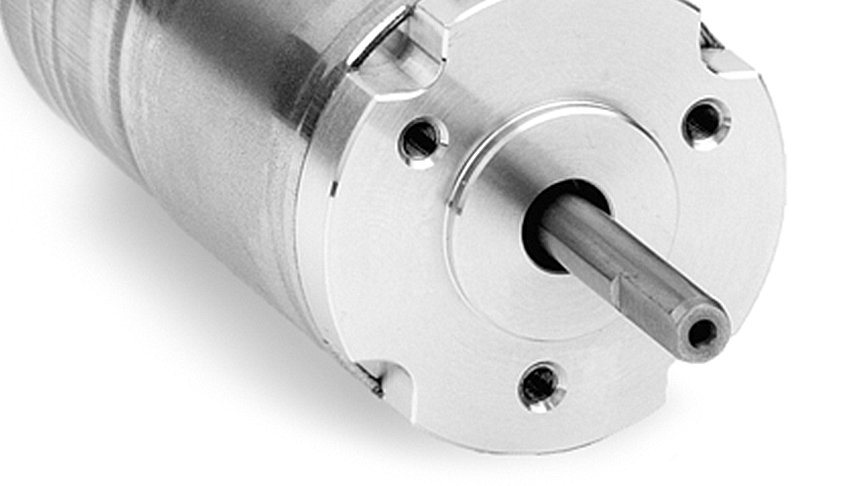
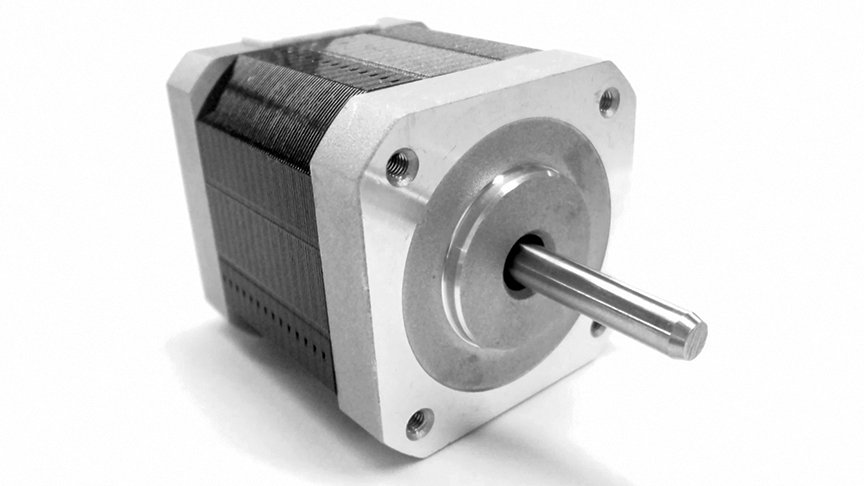
实现"倒立摆",不仅需要电机的旋转控制,还需要使用1台微控制器实现2台BLDC电机的电流矢量控制,在完全同步的状态下控制2个轴的位置,并使用运动传感器(3轴加速度、3轴角速度)感应姿势。这里利用了艾斯湃纳积累至今的运动控制技术和根据倾斜度精确控制电机的扭矩控制技术。
另一方面,为了使得"Plegg"能够在指定区域内驱动两轮行驶,我们构筑了新的系统,"Plegg"通过无线通信发送自己的位置信息到主机,由主机管理所有的状态并发送指令。艾斯湃纳一开始在"Plegg"上部装配了鱼眼摄像机,使其读取设置在周围的标志以检测位置。但是我们后来发现,如果直接使用鱼眼摄像机的彩色图像,由于荧光灯等其他的光线进入造成干扰,会导致标志难以辨别。为此,我们对鱼眼摄像机上做了特殊的修改,并标记具有特殊功能,从而防止干扰。
但是,即使采取这个方法,无法完全防止干扰。因此,艾斯湃纳进行了图像过滤,开发了从包含干扰的图像中选择正确的标志的新算法,实现了稳定的位置检测。
而且,由于鱼眼摄像机的性能和无线通信的延迟等原因,在图像和行驶路线等的输入数据与"Plegg"的实际运动之间可能产生时间差。我们也由"Plegg"的里程表情报和艾斯湃纳的特殊校正方法解决了这个问题。
 通过图像识别、传感和多轴控制、齿轮等实现两轮行驶
通过图像识别、传感和多轴控制、齿轮等实现两轮行驶
艾斯湃纳的工程师团队常年积累的技术沉淀和独特的创意
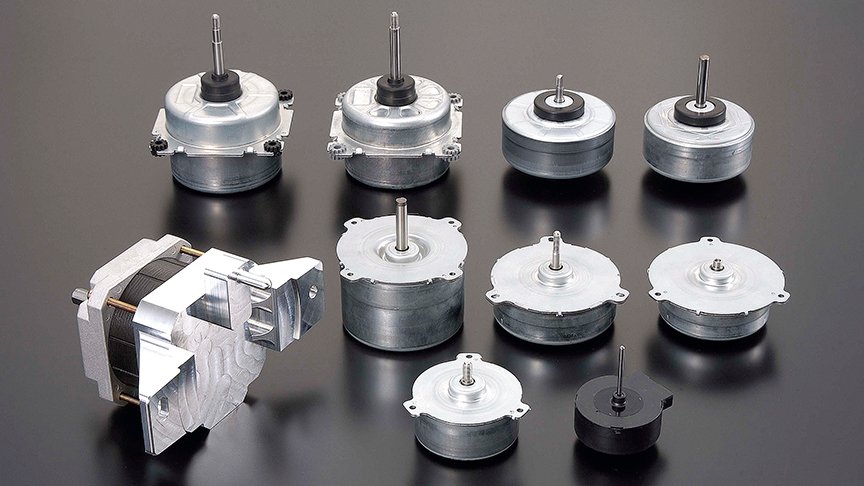
半个多世纪以来,艾斯湃纳不仅从事电机的开发和制造,而且还从事光驱和打印设备内置电机的产品开发和制造,最近还在开展用于商业用途的高速摄影机和福祉领域设备的开发和制造。
为了促进业务发展,艾斯湃纳不仅掌握电机技术,还拥有图像、视频处理技术、机器人控制技术和无线通信技术等各种核心技术。此外,我们还积累了从外观设计到机构设计、电源管理,设置与数据处理相关的电路硬件设计和固件等软件设计的相关技术和人力资源。
各种技术的相关部门之间,正在积极推进人员交流和信息共享,工程师中有很多人在加入公司后,辗转电子设备事业部、系统设备事业部、研究开发部门等多个部门,积累了丰富的经验。如此,艾斯湃纳依靠这些引以为傲的各种核心技术积累,以及那些能够跨界运用技术的人员,真正实现"Plegg"的复杂结构和控制,开发出外观独特的产品。
比如"Plegg"的行驶路线,我们原来不太熟悉机器人的路线设计,但是通过CAD的数据处理技术构建路线,在极短的时间内就导出了路线。另外,减少鱼眼摄像机干扰这个灵感、以及广受好评的可爱的蛋形设计都来自参与企划的员工提案。
 Plegg的内部结构 搭载控制器、9轴运动传感器、减速机、无线通信芯片、电池、红外摄像机等
Plegg的内部结构 搭载控制器、9轴运动传感器、减速机、无线通信芯片、电池、红外摄像机等
在前所未有的新领域和新用途,使用艾斯湃纳的"运动"解决方案
艾斯湃纳希望让客户在展览会上看到"Plegg",激发他们原来的灵感,从而促进客户的产品开发。
这是实际发生的事,一位企业员工在展览会上看到"Plegg"运动的样子后,来询问"Plegg"是否能当做台车,用在他公司正在开发的机器人的外壳上,以便外壳移动。"Plegg"是用于演示的小型机器人,因此不能直接使用。于是,艾斯湃纳制作了"Plegg"的专用基板以转动2轴电机,完成了满足客户需求的台车单元样品。
而且,我们认为艾斯湃纳在"Plegg"的开发中所获得的各种技术,还可以应用到活跃在多个领域的机器人上。例如,如果使用"倒立摆"实现两轮行驶就可以做小转弯,可以用于警卫的巡逻机器人。而且,通过图像识别获得的技术也可以用在机器人眼的视觉系统上。并且,将位置检测技术和无线通信技术与用于动作控制和故障检测等的AI系统结合起来,也很可能产生联动产品。
艾斯湃纳将为前所未有的新领域和新用途,以及未来会产生需求的领域和用途,提供"运动"的解决方案。
 主机的专用软件与多台"Plegg"边通信,边远程控制其行驶
主机的专用软件与多台"Plegg"边通信,边远程控制其行驶